Amortized Synthesis of Constrained Configurations Using a Differentiable Surrogate
Advances in Neural Information Processing Systems (NeurIPS) spotlight presentation, December 2021
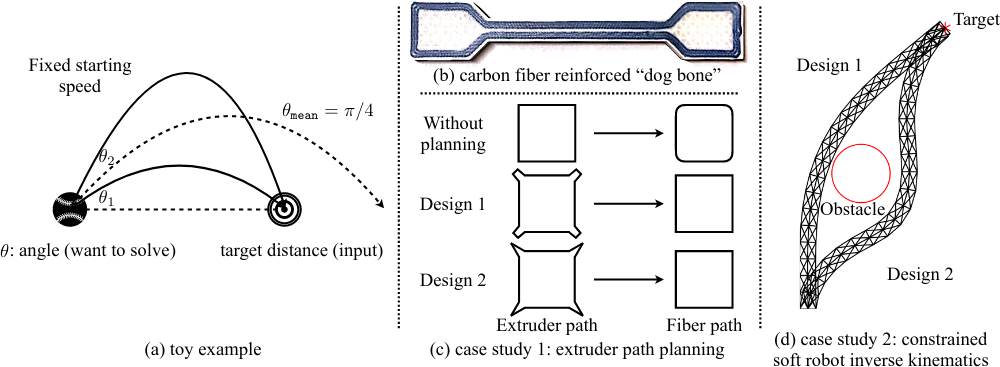
(a) For a fixed and large-enough starting speed, there exist exactly two angles such that the ball will
hit the target, where the mean of these two angles is π/4. (b) Some 3D printers utilize fibers to reinforce the
thermoplastic print. (c) For such printers, fiber is laid out along an extruder path but deforms into a smoothed
version due to the fiber’s high stiffness and low stretch. Our goal is to generate extruder paths that compensate
for the smoothing, but multiple extruder paths can result in the same target shape, such as a square. (d) In soft
robot inverse kinematics, we control the stretch ratios of both the left- and right-hand sides of a snake-like robot.
Our goal is to reach the target while avoiding an obstacle but, as is illustrated, the solution is not unique – two
different designs are shown.
Abstract
In design, fabrication, and control problems, we are often faced with the task of
synthesis, in which we must generate an object or configuration that satisfies a set
of constraints while maximizing one or more objective functions. The synthesis
problem is typically characterized by a physical process in which many different
realizations may achieve the goal. This many-to-one map presents challenges
to the supervised learning of feed-forward synthesis, as the set of viable designs
may have a complex structure. In addition, the non-differentiable nature of many
physical simulations prevents efficient direct optimization. We address both of
these problems with a two-stage neural network architecture that we may consider
to be an autoencoder. We first learn the decoder: a differentiable surrogate that
approximates the many-to-one physical realization process. We then learn the
encoder, which maps from goal to design, while using the fixed decoder to evaluate
the quality of the realization. We evaluate the approach on two case studies:
extruder path planning in additive manufacturing and constrained soft robot inverse
kinematics. We compare our approach to direct optimization of the design using
the learned surrogate, and to supervised learning of the synthesis problem. We
find that our approach produces higher quality solutions than supervised learning,
while being competitive in quality with direct optimization, at a greatly reduced
computational cost.
Paper
Links
Citation
Xingyuan Sun, Tianju Xue, Szymon Rusinkiewicz, and Ryan P. Adams.
"Amortized Synthesis of Constrained Configurations Using a Differentiable Surrogate."
Advances in Neural Information Processing Systems (NeurIPS) spotlight presentation, December 2021.
BibTeX
@inproceedings{Sun:2021:ASO,
author = "Xingyuan Sun and Tianju Xue and Szymon Rusinkiewicz and Ryan P. Adams",
title = "Amortized Synthesis of Constrained Configurations Using a
Differentiable Surrogate",
booktitle = "Advances in Neural Information Processing Systems (NeurIPS) spotlight
presentation",
year = "2021",
month = dec
}