Closed-Loop Control of Direct Ink Writing via Reinforcement Learning
ACM Transactions on Graphics (Proc. SIGGRAPH), August 2022
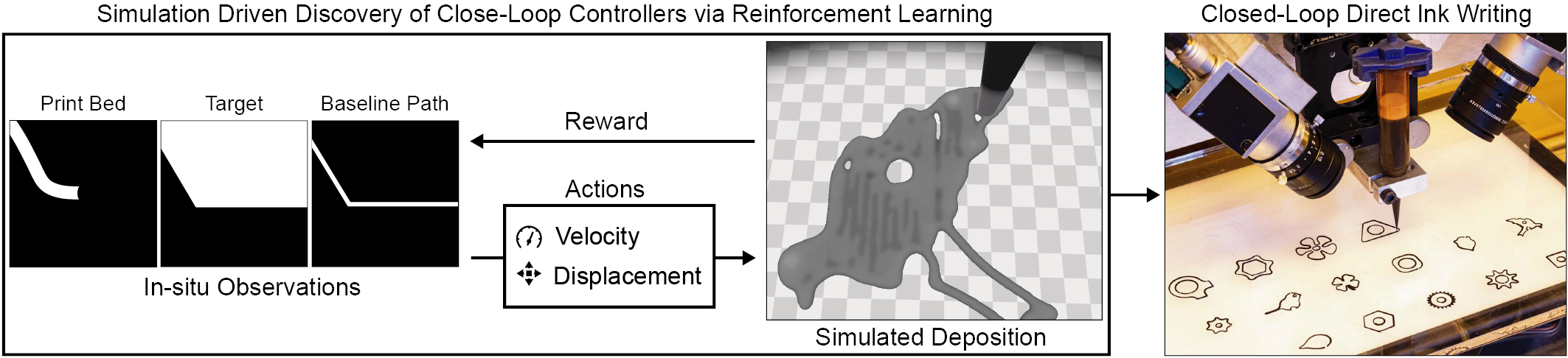
We propose a numerical environment suitable for learning close-loop control strategies for additive manufacturing via direct ink writing. Our method
observes an in-situ view of the printing process and adjusts the velocity and printing path to achieve the desired deposition. The control policies learned
exclusively in simulation can be deployed on real hardware.
Abstract
Enabling additive manufacturing to employ a wide range of novel, functional materials can be a major boost to this technology. However, making such materials printable requires painstaking trial-and-error by an expert operator, as they typically tend to exhibit peculiar rheological or hysteresis properties. Even in the case of successfully finding the process parameters, there is no guarantee of print-to-print consistency due to material differences between batches. These challenges make closed-loop feedback an attractive option where the process parameters are adjusted on-the-fly. There are several challenges for designing an efficient controller: the deposition parameters are complex and highly coupled, artifacts occur after long time horizons, simulating the deposition is computationally costly, and learning on hardware is intractable. In this work, we demonstrate the feasibility of learning a closed-loop control policy for additive manufacturing using reinforcement learning. We show that approximate, but efficient, numerical simulation is sufficient as long as it allows learning the behavioral patterns of deposition that translate to real-world experiences. In combination with reinforcement learning, our model can be used to discover control policies that outperform baseline controllers. Furthermore, the recovered policies have a minimal sim-to-real gap. We showcase this by applying our control policy in-vivo on a single-layer printer using low and high viscosity materials.
Paper
Links
- Video on Youtube
- Github Repository
- Project Page
Citation
Michal Piovarči, Michael Foshey, Jie Xu, Timothy Erps, Vahid Babaei, Piotr Didyk, Szymon Rusinkiewicz, Wojciech Matusik, and Bernd Bickel.
"Closed-Loop Control of Direct Ink Writing via Reinforcement Learning."
ACM Transactions on Graphics (Proc. SIGGRAPH) 41(4), August 2022.
BibTeX
@article{Piovarči:2022:CCO,
author = "Michal Piovar{\v c}i and Michael Foshey and Jie Xu and Timothy Erps and
Vahid Babaei and Piotr Didyk and Szymon Rusinkiewicz and
Wojciech Matusik and Bernd Bickel",
title = "Closed-Loop Control of Direct Ink Writing via Reinforcement Learning",
journal = "ACM Transactions on Graphics (Proc. SIGGRAPH)",
year = "2022",
month = aug,
volume = "41",
number = "4"
}